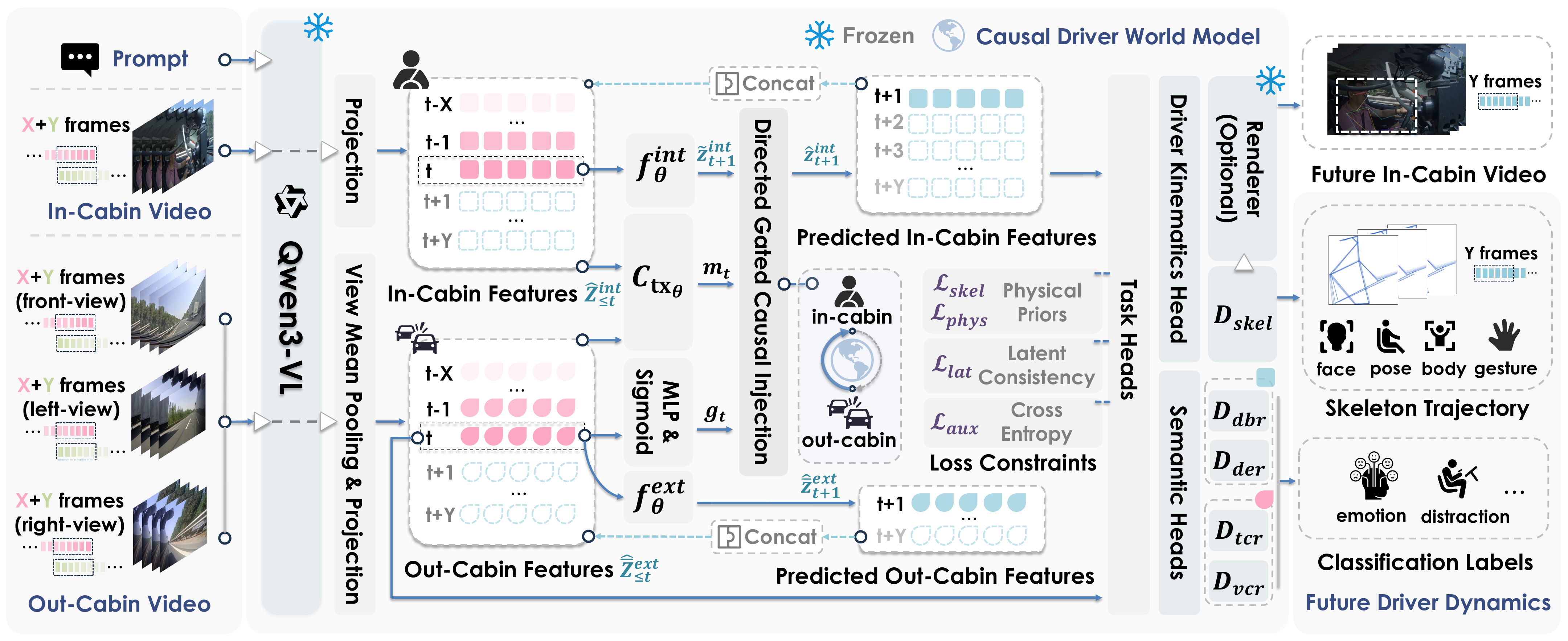
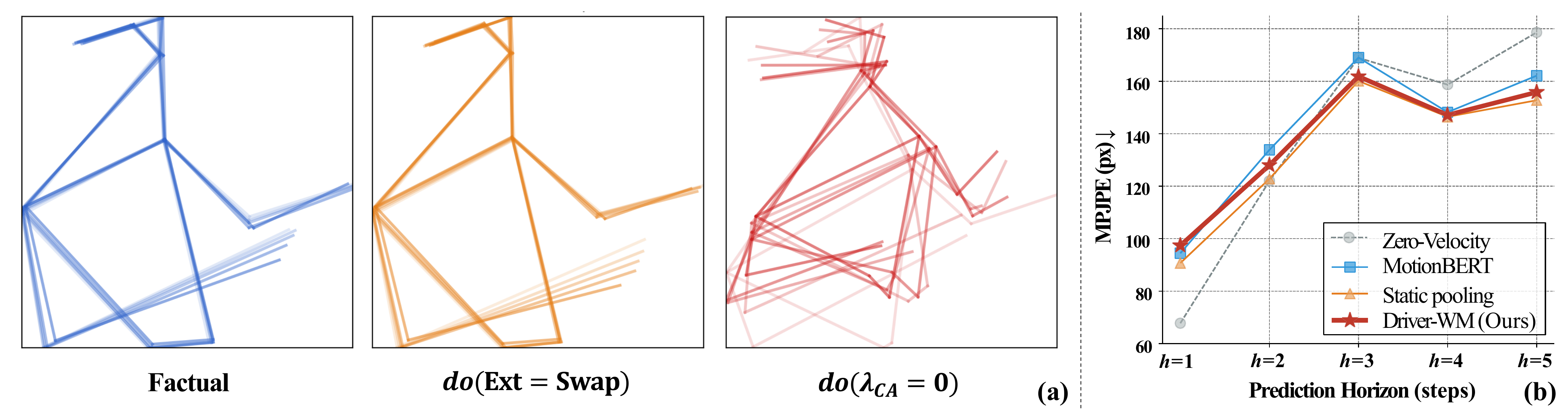

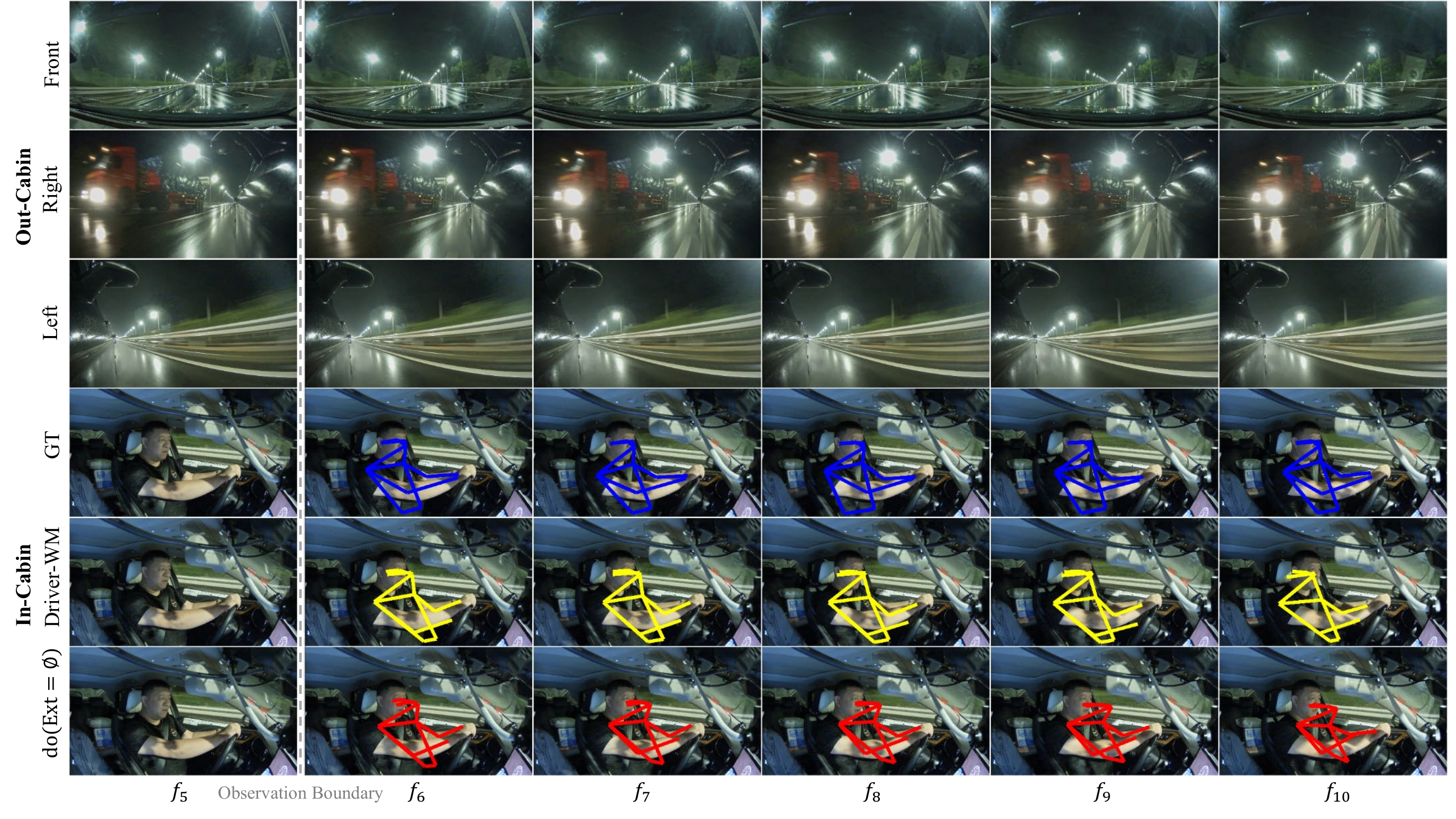
Driver-WM enables post-hoc test-time mechanism probes. External context can be swapped, removed, temporally shifted, or partially dropped; the injection path can also be clamped through the scalar override λCA. These interventions do not claim causal effect estimation, but they expose whether the trained rollout actually uses traffic context and whether the gated pathway is necessary.
Driver-WM: A Driver-Centric Traffic-Conditioned Latent World Model for In-Cabin Dynamics Rollout
1Nanyang Technological University
2Hubei University
3Osaka University

Accepted to ECCV 2026 Main Conference
European Conference on Computer Vision (ECCV) 2026